How the integration of science behind, aerial physics, electronics, and mechanical design could be used to develop an aerial vehicle prototype.
I know that for many children is really attractive the idea of robotics, artificial intelligence, drones, planes, and tech stuff, and it was my child dream, all the aerial vehicles are really attractive to research and develop, especially the most simple of that family, the quadcopter, for this reason at the robotics research group at National University of Colombia, we decided to develop a quadcopter from scratch. Four career partners and friends joined me to create, build, and fly this amazing vehicle. The next lines will describe some engineer aspects, also experiences from the design to the catastrophic crashes flights.
The Research
At the beginning, we had meetings with the objetive to decide the type of quadrature to develop and the electronics, avionics for use in this project, hence, the first thing to decide was the flight controller, on the one hand we could find great options but really expensive like, DJI A3 Controller and DJI Naza 2, these controllers are really good because it has a incredible support, on the other hand we could find open source technology like Pixhawk and ArduPilot, if we analyze the performance of Pixhawk and DJI A3 we could conclude that have similar performance, finally, we decided to use ArduPilot because we had limited budget for the project. The below diagram shows the main parts and technology used for the drone, composed of two communications, RC control, and Telemetry.

One of the great benefits of Ardu-pilot (APM) is the capability to be controlled with python using MavLink communication protocol, there are libraries available like DronKit also supported on ROS, thus, this allows the quick integration of Linux Embedded computer like Raspberry pi, additional technology like Nvidia Jetson Nano or Nvidia Jetson TX gives the possibility to have a big brain to decide, store, and run algorithms for researching in autonomous vehicles.
The Mechanics
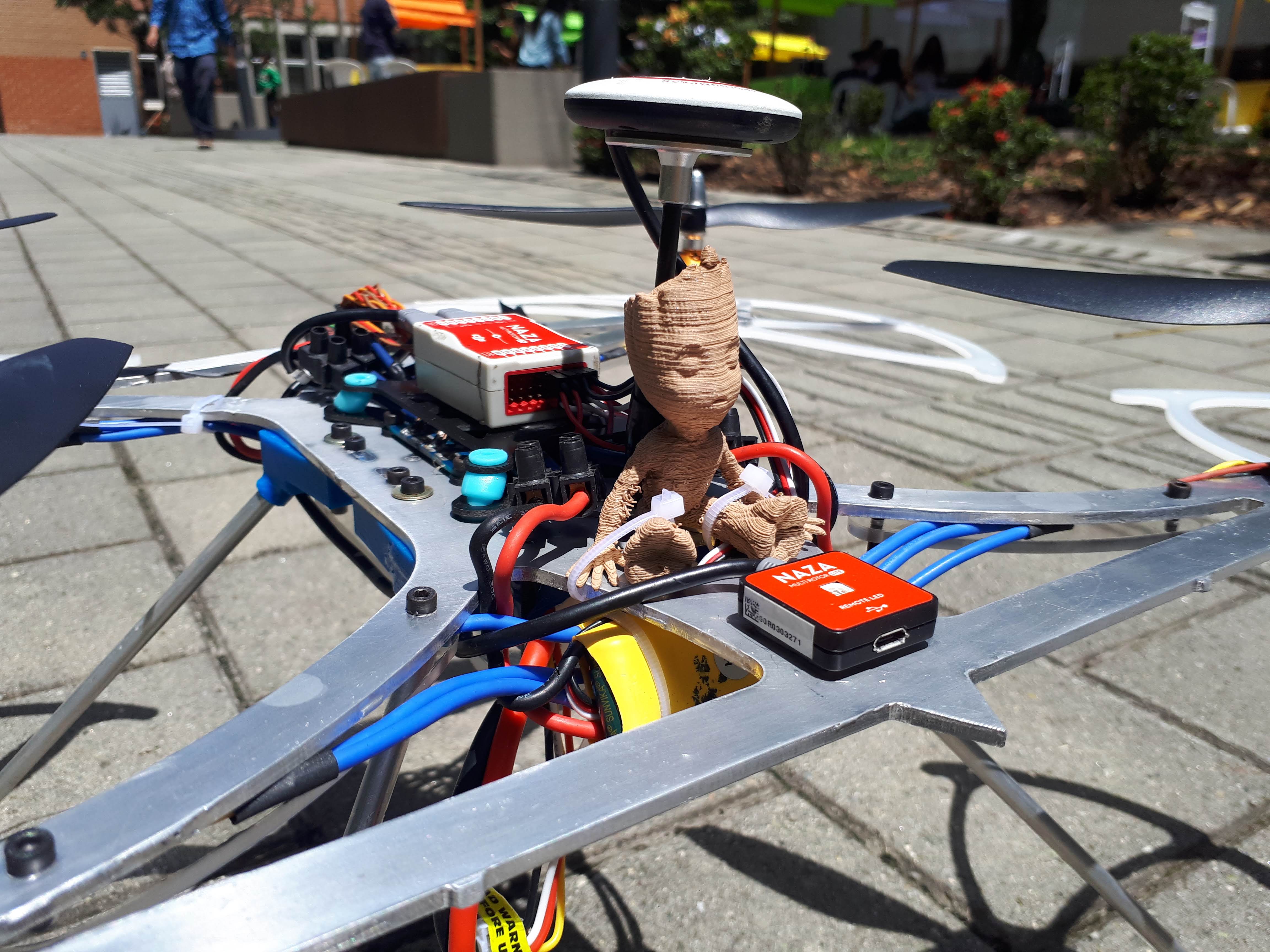
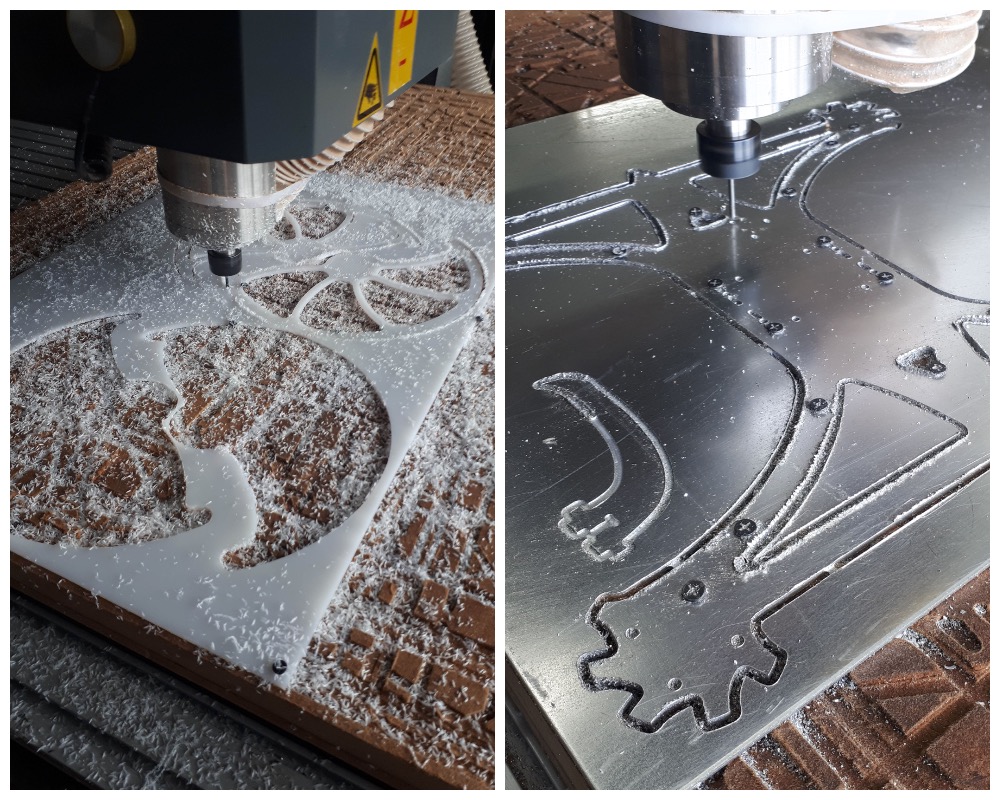
There are lot of possible designs for the frame, due that we wanted to build a quadcopter we decided to use de X type of frame, according to the recommendations of the robotics group and limited in budget to invest, the best material for aerial applications is carbon fiber, but we had to choose aluminium, the most lightweight 5mm aluminum type in the market, finally, the design was done in base of the propellers with length of 10 inches, and we added a thin film of impact polyethylene to reduce the probability of breaking it.
The complete manufacture was done in FabLab prototype laboratory, using CNC milling machine, in the same way, the design was done in Solid Edge ST10 and the CAM program was done in Autocad Fusion 360. The electronics chosen was APM 2.8 with Neo-6M GPS, 3DR Radio Telemetry 915Mhz, 4 Cells 15000 mA lithium battery and FlySky radio controller.
APM has some issues with the control algorithms, frequently lose RC communication as well as stability, this problems resulted in 2 crashes, one happened at 10 m of altitude while it was landing but a high speed for control lost communication and the other in take-off near to the roof. With this flight controller, the college participated in two contests, one at National University of Colombia, and the other with the Sena - Unicentro Flight contest.
The success flights and mayday crashes
After all the manufacture process, the integration of electronics, avionics and controllers, we succeed with the quadcopter for finally get some flight test to check the flight configurations of APM, energy consumption, stability and maneuverability, after done several tests we found issues with the APM controller, firstly, we saw that in time intervals the radio controller lost connection with the vehicle, the problem was intermittent and it doesn’t occur all the time, secondly, the quadcopter started to lost it front, in other words, some times the front and back of the vehicle started to interchange between it, as a consequence, the pilot couldn’t determine well where is the dirección of advance of the drone, thus, we had two horrible crashes as we see in the image below, but also we had several incredible and great flights.

This drone participated in two contests, one at National University of Colombia, and the other with the Sena - Unicentro Flight contest, additionally, this project gave me the chance to assist to Drone Fundamentals Course at Centro de Investigaciones en Óptica in México, also I did my final degree research in computer vision algorithms for aerial vehicles in the same place.
Wait for the next version of this drone, using Pixhawk, Nvidia Jetson Nano and cool algorithms stuff for unmanaged vehicles, integrating computer visión and robotics science,